Hip Exoskeleton Project
January 2021 - May 2022
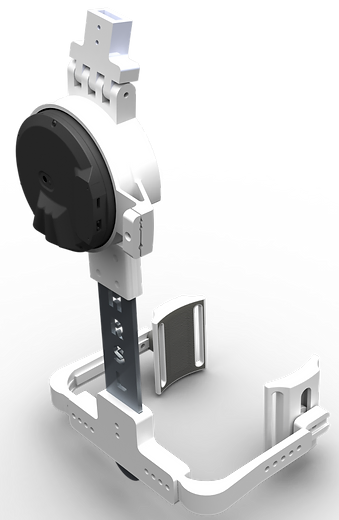
Full view of the Hip Exoskeleton prototype
Project Overview
My work on the hip exoskeleton was twofold; I researched the reaction to an applied load using the exoskeleton and developed controllers and tools to enable more powerful exoskeleton uses.
Technical Details
At the UMass Human Robot Systems Lab (HRSL) I worked as a graduate researcher while completing my M.S. to research and develop new methods for controlling gait. Patients with traumatic injuries or neurological conditions will often have asymmetric neuromotor impairments which may affect their ability to perform daily functions, including walking. A common goal of exoskeleton research is to identify methods to rehabilitate these impairments by interacting with the patient in some way. The HRSL Hip Exoskeleton was created to apply resistive or assistive loads on the hip during experiments and hopefully identify gait reactions to those loads. Equipped with one Dephy ActPack on each side, the Hip Exoskeleton is capable of asymmetric loading on the hip joint and independently record metrics from each side using the onboard sensors.
Early in my time with the HRSL, we ran a study to evaluate the impact of asymettric stiffness across the hip joint using the exoskeleton.
Custom Controllers and Experimental Tools
During the study, we had primarily used the proprietary software from Dephy for motor actuation and data recording. However, the API and custom scripting was a more powerful option for creating controllers and tools for data processing.
Key Takeaways and Interests
As I became more familiar with the field, I began to find connections between a lot of the papers that I had been reading and my classes that were based more in mathematics. Nonlinear Dynamcis and Controls was invaluable in understanding some of the concepts that I was exploring and helped me contextualize a lot of human behaviours with dynamics concepts. Limit cycles and feedback control were obviously apparent in the human control loop, which led me to gain even stronger interests and curiosity with human motor control. I particularly loved reading papers about underactuated control and trying to find connections with neural motor control, attempting to bridge the two topics and realizing that there was still a huge gap that I needed to familiarize myself with before those ideas became more based in scientific discovery. Nonetheless, I still feel that these gaps are still waiting to be filled and that drive helped me immerse myself and come to a greater understanding of gait. While my time at the lab was relatively short (6 months), it changed my mindset on research and how cut out I was for an academic work environment. It's an environment that I would love to get back into and after my experience at the HRSL, I'm fairly confident that I could succeed in creating novel research.
Results and Impact
The project contributed to a better understanding of gait reactions to applied loads and resulted in the development of custom controllers that enhanced the capabilities of the exoskeleton for future research.
Back to Portfolio