Portfolio
Draper Laboratory Work
August 2022 - Present
Using mechatronics skills to work on state-of-the-art electromechanical systems.
Read more...Benchtop Dynamometer
January 2023 - Present

Prototype of the benchtop dynamometer
Development of a benchtop dynamometer to compare performance and characteristics of DC motors for robotic applications.
Read more...Furuta Pendulum Simulation
October 2023 - Present

Visualization of the Furuta Pendulum Simulation
Simulation of a Furuta pendulum using Gazebo and Drake, with advanced control algorithms implemented in C++ and ROS 2.
Read more...Gearbox Design and Prototyping
January 2023 - Present

Prototype of a cycloidal gearbox
Design and prototyping of cycloidal and planetary gearboxes for use with brushless DC motors in robotic applications.
Read more...Hip Exoskeleton
December 2021 - May 2022
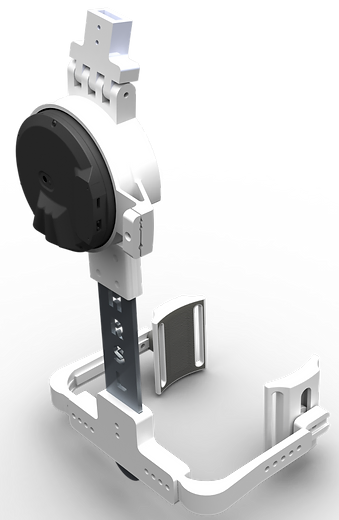
Full view of the Hip Exoskeleton prototype
My work on the hip exoskeleton was twofold; I researched the reaction to an applied load using the exoskeleton and developed controllers and tools to enable more powerful exoskeleton uses.
Read more...